Avery Chiu
Mechatronics Engineering Student
Artificial Intelligence Option
University of Waterloo
Former Display Engineering Intern at Tesla
About Me
I am a mechatronics engineering student at the University of Waterloo with a keen interest in machine learning,
embedded systems, brain-computer interfaces, and software development.
SBX Robotics (YC W21) is a startup that creates synthetic data for training machine learning models. At my time there, I
implemented a cool image processing library called Albumentations into their post-proessing pipeline for their synthetically generated images.
This allowed for us to easily augment images with different transformations such as gaussian noise or downscaling, which helped
create more robust ML models for segmentation, keypoint detection, and 6D pose. I also integrated the Hugging Face stable diffusion API into
our system to easily augment images, while keeping segmentation masks relatively in the same place by using depth2image and in-painting.
Enlighted
At Enlighted (A subsidary of Siemens), I was a Algoriths/Machine Learning Engineering Intern. There I focused on the development
of the machine learning models and preprocessing pipeline optimization for Bluetooth localization. Enlighted has created a Bluetooth
tag for tracking objects in a building (think hospital or office).
Tesla
I was a former Display Engineering Intern at Tesla. There, I worked on a developing software for a
3-axis robot to automatically test displays and ensure they function properly. This robot would automatically
run tests on our displays and verify that the display would respond properly. I also worked on reliability testing of
the Bluetooth system for the car computers.
University of Waterloo Vision and Image Processing Lab
As an undergraduate research assistant for the VIP lab, I developed python code with Detectron2 to be
used to detect northern leaf blight in maize. Most of my time was spent analyzing results and calculating AP/AR
for all the ground truth and predicted images of corn.
Ford Motor Company
I was a Firmware Development co-op at Ford. My role was to work on developing the bootloader and kernel
for the telematics control unit (TCU) and also Sync, Ford's infotainment system. These systems play an important
role in Ford vehicles.
Geotab
I interned at Geotab as an Automotive R&D Intern. Here I worked on many different projects.
The above image shows a mini-car replica that I created to demonstrate Geotab's IOX-Keyless, which
would allow vehicles to be unlocked/locked using bluetooth or NFC.
Design Teams
WATOLINK
WATOLINK is a brain computer interface (BCI) team. I co-founded this team with my friend Chris Samra.
We are currently competing in the NeuroTechX competition and designing an SSVEP speller to communicate
to others, through a computer, using brain signals.
WATonomous is an autonomous car team, we participate in the SAE Autodrive Challenge which is a series of challenges
to test the functionality of our Level 4 autonomous car in an urban driving environment. My role consists of developing
the ROS interface to receive data from the CAN bus and also leading my team to develop the telemetry system.
Midnight Sun is the University of Waterloo Solar Car Team, we participate in the American Solar Car Challenge.
My firmware projects on the Midnight Sun Solar Car Team include CAN Explorer, driver display,
telemetry, drivers for different MCUs, and the steering stalk.
At WATOLINK, we developed a neural interface for communication using the SSVEP paradigm that got us
first place at the NeuroTechX 2022 competition. We took advantage of OpenAI's GPT3 for sentence
prediction and also allow the user to record their voice
for the computer to replicate when they want to speak with the neural inteface.
At Hack the North, my friends and I built BB-8 in under 36 hours. The judges loved it so much that they made us
finalists and Hack the North where we got to pitch our idea on stage for all the participants to see.
We built BB-8 controlled using eye-gaze using eye-tracking glasses from AdHawk Microsystems.
My friends and I won an award at MakeUofT21 for building Cigbot. We created a robot that would safely pick up
and dispose of cigarette butts on the ground. We used a Raspberry Pi, Arduino, and Pi Camera to detect cigarette butts,
drive towards them, and pick them up.
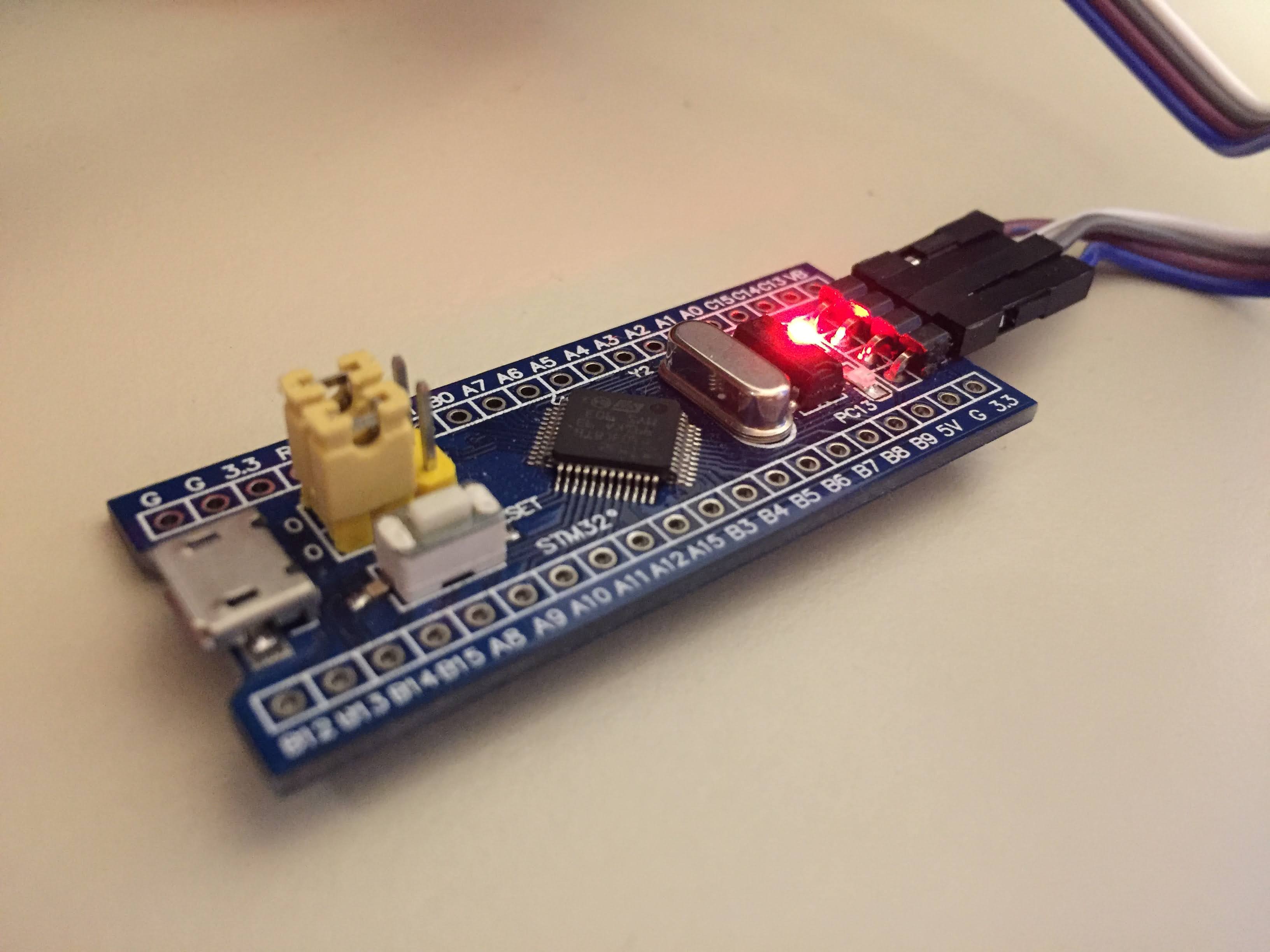
I wrote GPIO,I2C,SPI, and USART for an STM32F103C8T6. These drivers were mainly created for me to familiarize myself
with navigating datasheets and finding the right information from the right places (eg memory map, vector tables).
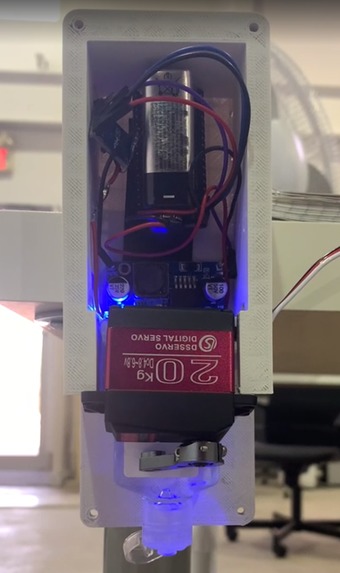
I attended the Hack the 6ix hackathon which was hosted online. My friends and I decided to have fun with this project
and I had the opportunity to play with an ESP32 which I had just purchased. For the project, I wrote code to allow
the ESP32 to interface with the MPU-6050 accelerometer/gyroscope with SPI and to control a servo motor according
to the values of the accelerometer.
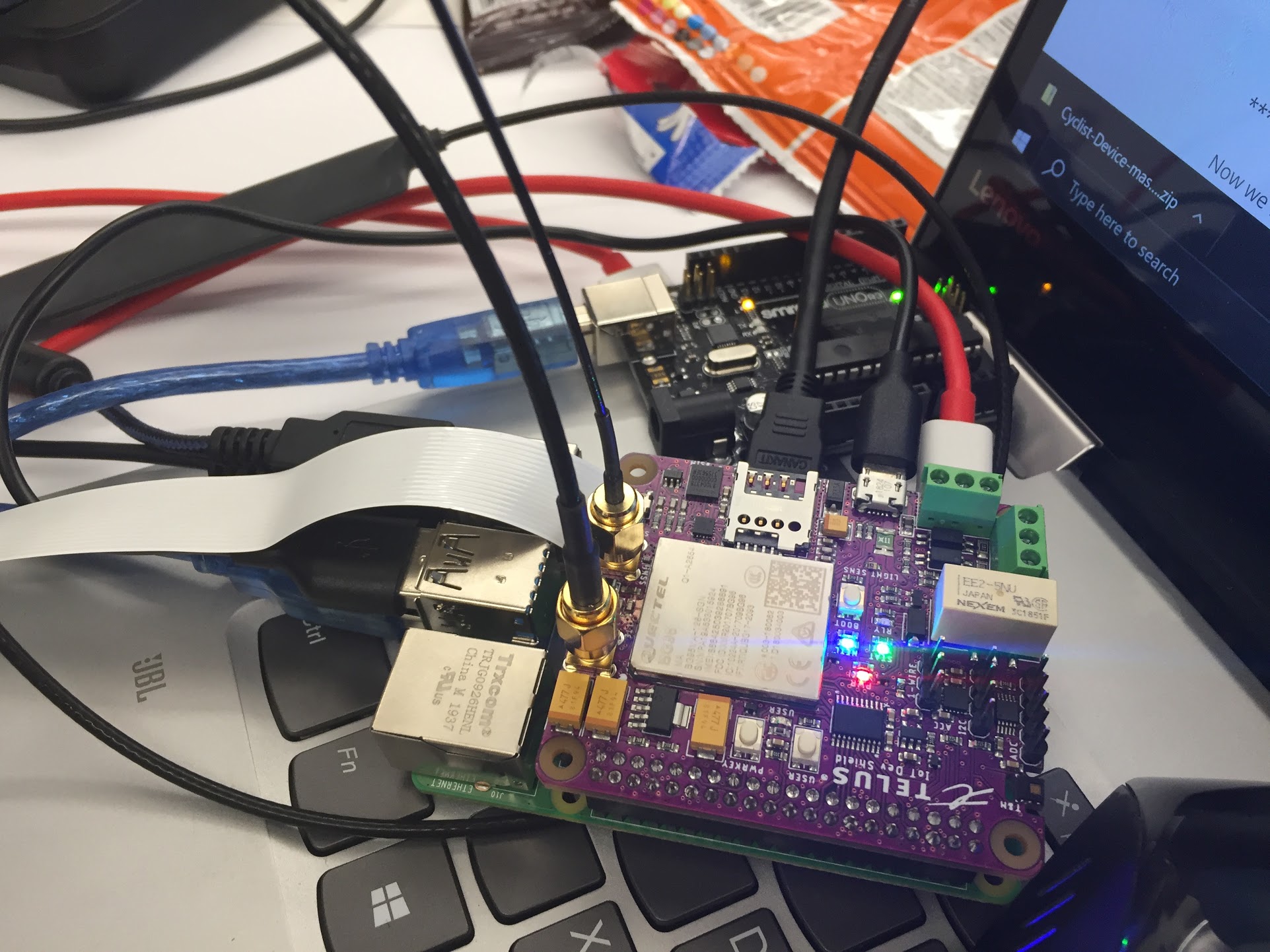
We named this bike telematics device Cyclus. This was created for the MakeUofT Hackathon were we worked closely
with Telus and where we used their TELUS CAT M1 cellular shield as a GPS, accelerometer, and an SMS sender. The device
has the capability to be "locked". When locked it will detect when someone tries to steal the users bike and will help
provide constant GPS tracking to locate the bike. It will also warn the user with an SMS message.
Above is a video of my robotics team (7721) competing in the FIRST Robotics Competition.
I participated in the FIRST Robotics Competition in highschool which was a competition to create a robot
that could perform certain tasks, such as launch balls, place panels, and climb. This robot is seen above. However
I also participated in Robot in 3 Days (Ri3d) which was an extension of FIRST Robotics but a 3-day sprint instead.
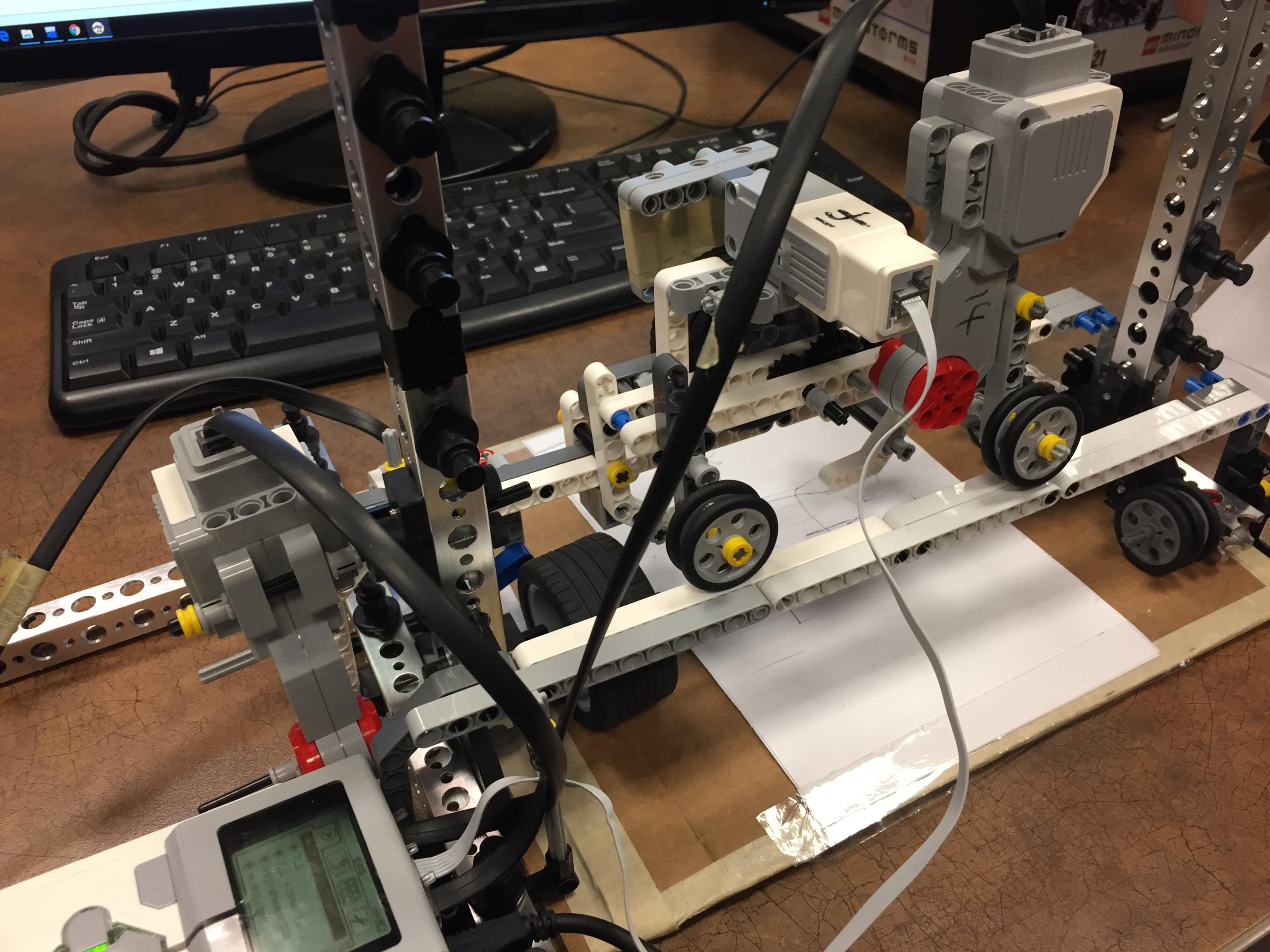
A program that interprets a function and provides the information to a LEGO EV3 robot for it to draw the graph of that function.
This was created by 2 other mechatronics engineering students and I as a first year final project.
It features a combination of C++ and RobotC.
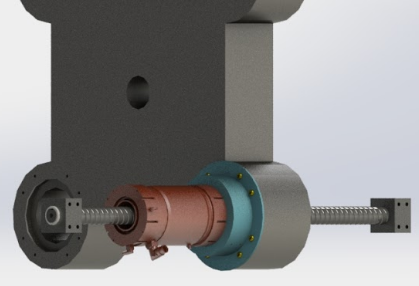
I participated in the 2021 National Design League Online Designathon and worked with friends of mine to
develop housing for parts of a injection molding machine. We ended up creating plates to connect
the motor to the axle and bearings on the machine, which connected to the staten.
The plates can be seen in blue above and is made of 1045 steel. The motor is in red.
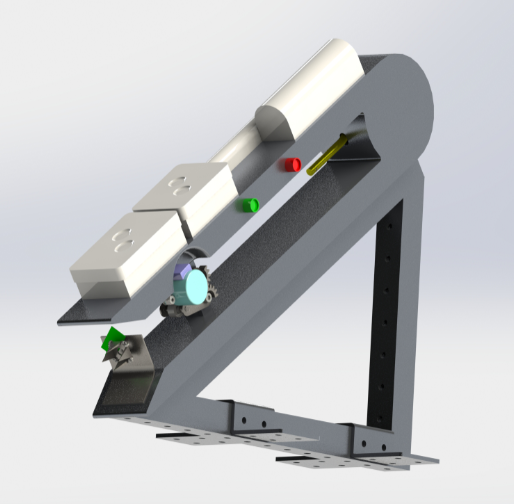
Self Feeding Catheter
A group of 3 friend and I were given a challenge at the McMaster Designathon to create a
medical device that would assist doctors with inserting catheters into patients.
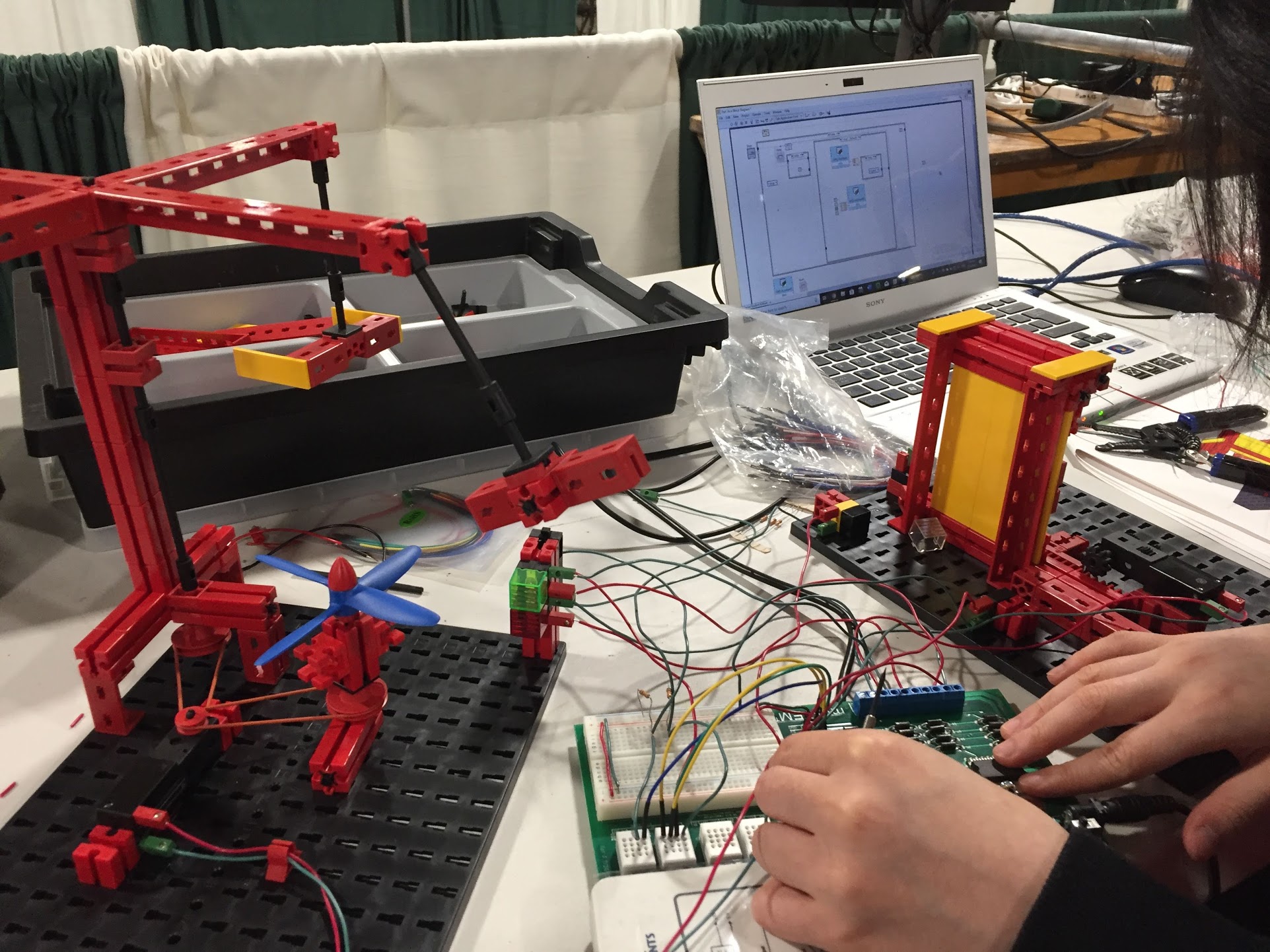
Automated Ferris Wheel
This ferris wheel was created for the Ontario Skills Competition. It was interesting since this was my first time
having to program with Labview. My friend and I got a bronze medal in the Robotics
and Control Systems category for our efforts in this one day competition.
Users go through a door, where a sensor detects how many people pass. Once a certain number of people pass, the
ferris wheel starts spinning. There is an emergency stop button that will stop the whole system with one press
of a button.
Get In Touch
Please send me an email if you would like to contact me.